






工業機器人為什么要用減速機?
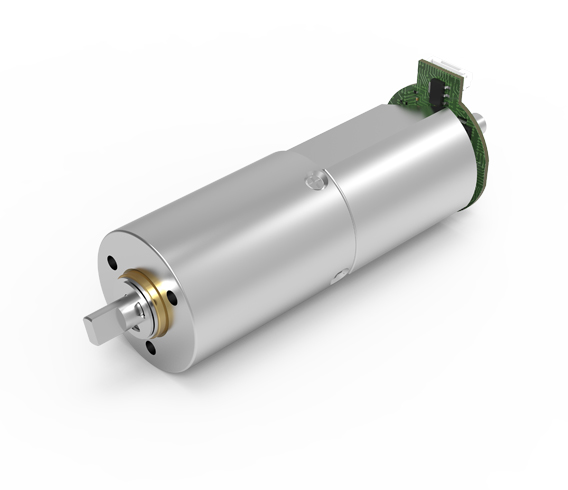
工業機器人為什么要用減速機?在了解這個原因之前,先了解工業機器人和減速機概述;工業機器人 指的是能在人的控制下智能工作,并能完美替代人力在生產線上工作的多關節機械手或多自由度的機器裝置。與人力相比,工業機器人具有低成本、高效率以及24小時工作的特點。減速機是一種由封閉在剛性殼體內的齒輪驅動、蝸桿驅動、齒輪-蝸桿驅動所組成的獨立部件,常用作原動件與工作機之間的減速驅動裝置,減速機在原動機和工作機或執行機構之間起匹配轉速和傳遞轉矩的作用。作為一種相對精密的機械,使用減速機的目的在于降低轉速,增加轉矩。
工業機器人使用減速機是為了保證工業機器人在生產中能夠可靠地完成工序任務,在重復執行相同的動作時能保證工藝質量,工業機器人需要很高的定位精度和重復定位精度。因此,提高和確保 工業機器人的精度就需要采用精密減速器。伺服電機同樣也能保證精度,但是當負載較大時,一味提高伺服電機的功率是很不劃算的,可以在適宜的速度范圍內通過減速器來提高輸出扭矩。此外,伺服電機在低頻運轉下容易發熱和出現低頻振動,對于長時間和周期性工作的工業機器人這都不利于確保其精確、可靠地運行。
精密減速器的存在使伺服電機在一個合適的速度下運轉,并精確地將轉速降到工業機器人各部位需要的速度,提高機械體剛性的同時輸出更大的力矩。與通用減速器相比,工業機器人關節減速器要求具有驅動鏈短、體積小、功率大、質量輕和易于控制等特點。大量應用在關節型工業機器人上的減速器主要有兩類:RV減速器和諧波減速器。在關節型工業機器人中,由于RV減速器具有更高的剛度和回轉精度,一般將RV減速器放置在機座、大臂、肩部等重負載的位置,而將諧波減速器放置在小臂、腕部或手部。
工業機器人常用的減速機有諧波減速機、RV減速機、行星減速機、蝸輪蝸桿減速機、齒輪減速機、關節減速機等,不同類型減速機的技術參數、性能特點都不一樣。