






機器人關節用的什么電機?
2022-1-6 03:50
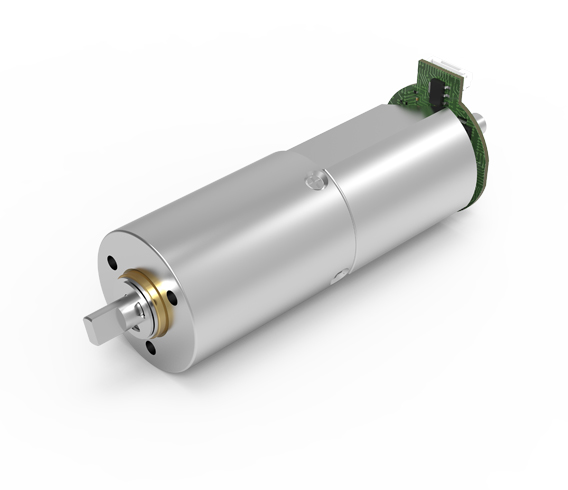
機器人關節是允許機器人本體各零件之間發生相對運動的機構。關節之中,凡單獨驅動的稱主動關節,反之,稱從動關節。主要分為兩種:平動(移動)關節,也稱之為移動副,允許連桿作直線移動。轉動關節,也稱之為轉動副,允許連桿作旋轉運動。機器人關節模組通常采用驅動旋轉電機、伺服電機、一體化直接驅動旋轉電機、模塊化直接驅動旋轉電機、諧波減速器、VR減速器、行星齒輪箱電機、蝸輪蝸桿齒輪箱電機、步進電機等。
電機大致可細分為以下幾種
1.交流伺服電動機:包括同步型交流伺服電動機及反應式步進電動機等。
2.直流伺服電動機:包括小慣量永磁直流伺服電動機、印制繞組直流伺服電動機、大慣量永磁直流伺服電動機、空心杯電樞直流伺服電動機。
3.步進電動機:包括永磁感應步進電動機。

相關產品/ RELATED



在線留言 MESSAGES